
Le celle di lavorazione robotiche fanno parte di un sistema integrato di produzione, dove il flusso viene ottimizzato per ridurre al massimo tutti i costi e le inefficienze. Per un maggiore controllo della sicurezza e della precisione delle operazioni, l’ambiente è delimitato.
I manipolatori, più utilizzati, nelle celle sono robotici e caratterizzati da certi assi, angoli di libertà e sensori. Essi permettono l’esecuzione delle operazioni più semplici e ripetitive ottimizzandone la precisione ed i tempi di esecuzione. La gestione dinamica dei movimenti avviene grazie alla comunicazione delle postazioni con il manipolatore tramite PLC o attraverso il collegamento diretto con il controller.
Analizzando il caso in esame della cella robotica per la presso-piegatrice per lamiere in metallo, vale la pena menzionare che la lavorazione dei metalli in Italia è di vitale importanza per il paese, grazie al suo impiego in moltissimi settori come per esempio quello meccanico e quello edile, quello dell’arredamento e nei più moderni settori come quello delle energie rinnovabili, dell’industria agroalimentare e perfino delle nuove e moderne ferrovie.
Le caratteristiche del metallo, quali la versatilità di utilizzo e la resistenza, lo rendono un materiale che rispetti la natura e che eviti quindi sprechi di materie prime e di energia.
Nel layout della cella presa in esame, vengono considerati i parametri relativi alle tempistiche dei robot e delle postazioni, il dimensionamento e lo scheduling.
La cella di lavorazione 4.0 e per la pressopiegatura delle lamiere in ferro, si compone essenzialmente di 5 moduli:
- una pressa idraulica motorizzata modello AXA P150MR a doppia velocità della capacità di 150 t;
- 1 robot Kuka KR16 R 2010 (Germany);
- 2 carrelli;
- 1 MIR;
- 1 controllore logico programmabile.
La domanda dei prodotti piani è sostenuta dai settori a valle della trasformazione della lamiera, i quali operando in diversi settori fondamentali per l’economia del paese e mantengono la domanda piuttosto stabile, in diverse produzioni fondamentali per
l’economia italiana.
Le aziende che lavorano la lamiera, le quali rientrano nel settore manifatturiero, devono aumentare la competitività migliorando a livello di qualità ed efficienza della produzione specialmente nei settori ad alta precisione.
Oltre che per i processi di filtraggio e separazione industriale, la lamiera forata ha altri numerosi vantaggi e utilizzi, per esempio nell’ambito architettonico oltre ad alleggerirne il peso, permette sia il filtraggio che la diffusione dell’aria, della luce, la dissipazione del calore e suono. La duttilità ed universalità spiegano il grande utilizzo della lamiera nei più svariati settori, tuttavia non sempre la lamiera piena soddisfa le esigenze di produzione, di sicurezza e di design.
Di solito la piegatura deve superare sia le sollecitazioni a trazione che le sollecitazioni di compressione. Vengono adottati sistemi in grado di compensare le deformazioni e fornire in tempo reale la misurazione dell’angolo ottenuto, la precisione nelle tolleranze dimensionali e l’estetica del prodotto finito.
La cella permette l’automatizzazione del lavoro di piegatura grazie alla programmazione sinergica dei moduli presenti al suo interno, robot per la manipolazione soprattutto se il pezzo ha dimensioni non gestibili a livello manuale.

Pressa idraulica motorizzata modello AXA P150MR

Robot Kuka KR16 R 2010 (Germany)

Il MIR 200
La pressa permette alte prestazioni, grazie al suo design è dotata di una centralina a motore immerso 400, di una pompa per avvicinamento e ritorno in rapido tarata, di valvola di massima con blocco meccanico per impedire sovrappressioni e il manometro (di serie) permette di tarare con estrema precisione la potenza erogata.
Il KR 16 R16 KUKA è progettato per un carico utile nominale di 16 kg, ottimizzare le prestazioni dinamiche del robot, con baricentro ridotto
possono essere utilizzati carichi maggiori fino al carico utile massimo.
Il MIR è un robot mobile sicuro ed economico che automatizza rapidamente i trasporti delle lamiere e la logistica interna. I flussi di lavoro vengono quindi ottimizzati, liberando il personale e contribuendo così ad aumentare la produttività e a ridurre i costi.
La cella è un sistema produttivo, facente parte di un flusso ordinato per ottimizzare i tempi e l’uso di risorse . Nella cella, le macchine sono in grado di comunicare tra di loro e con il sistema esecutivo della manifattura MES. I movimenti, all’interno della cella, sono perfezionati per essere logici, fluidi e sicuri per la corretta esecuzione delle operazioni.
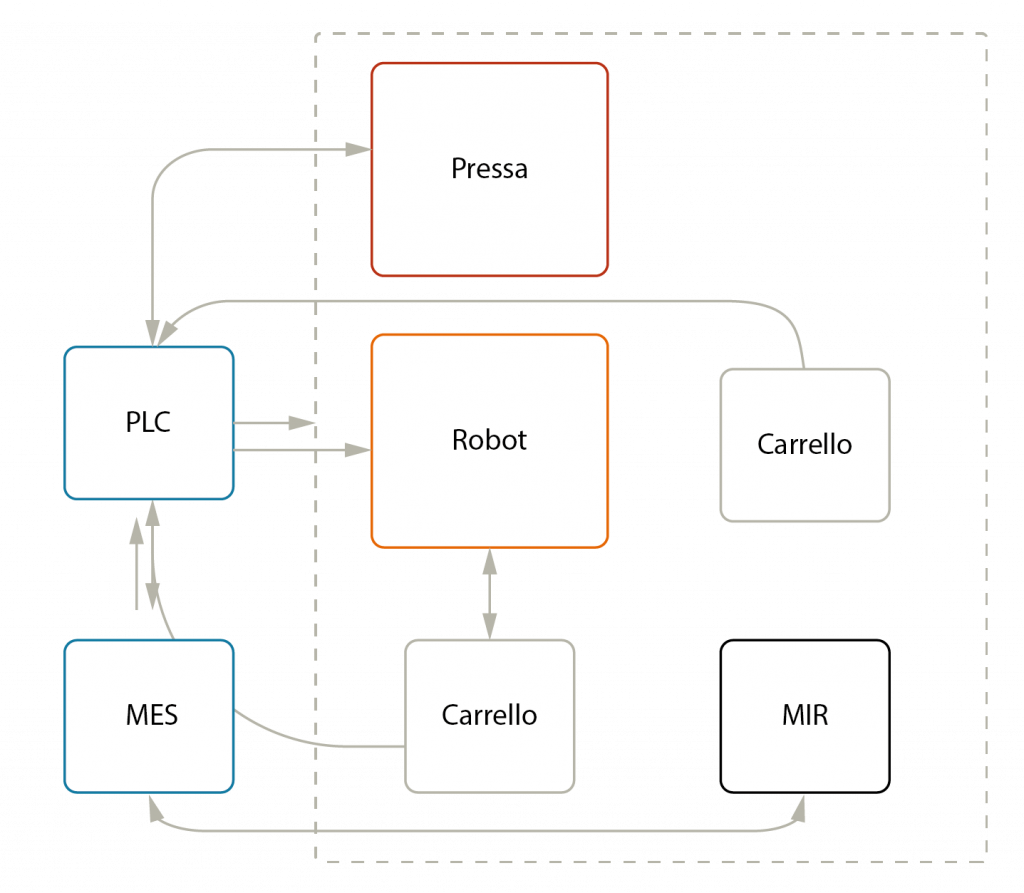
Layout Cella Robotica della Presso-piegatrice
L’area di lavoro è definita dalle dimensioni operative a seconda degli assi di traslazione x,y e z. Le dimensioni degli assi influiscono sulla dimensione massima dei pezzi da lavorare e sul tipo di lavorazioni che possono essere effettuate.
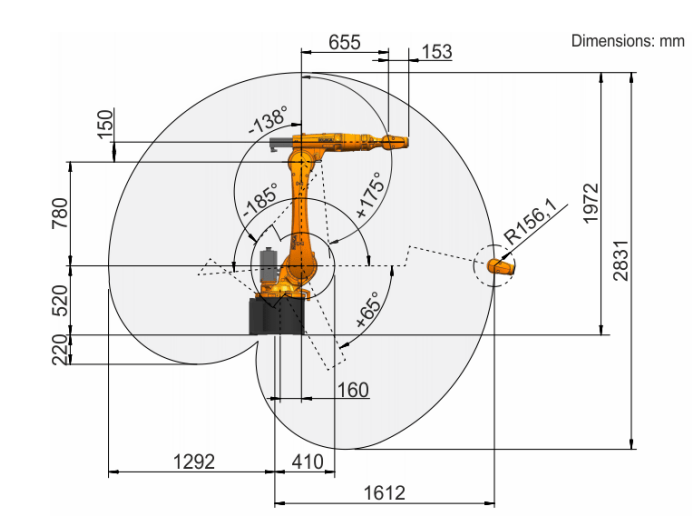
Schema dello spazio di lavoro raggiungibile dal manipolatore
Key4 identifica i problemi delle aziende, valuta quelli che possono essere gli strumenti per risolverli, progettale soluzioni e la cella, simula il processo di lavorazione, testa e gestisce l’ambiente e la programmazione in modo da consegnare un sistema integrato chiavi in mano.
